

● Kiʻekiʻe ka pono ma ka hui pū ʻia me ka lima ʻole ka nui i hoʻokomo ʻia.
● ʻIke pono ka mīkini i ka nui aniani a hoʻoponopono i ka laulā kaʻina kūpono.
● Arris, e hoʻopau ʻia ka wili maka kumu i ka manawa hoʻokahi.
● Hoʻohui me ka hoʻouka / hoʻokuʻu i ka mīkini holoi papaʻaina me ka wikiwiki wikiwiki e hana i ka naʻauao piha, ka mana kiʻekiʻe, ka uku hana haʻahaʻa.
| ʻāpana ʻenehana | EDC3625 | EDC2516 |
| Laulā Hana | 300x700~ 2500x3600mm | 300x700~ 2500x1600mm |
| Mānoanoa aniani | 4-8mm (a i ʻole 8-12mm) | 4-8mm (a i ʻole 8-12mm) |
| Kūlana ākea | 0.5-2mm | 0.5-2mm |
| Ka māmā holo | 12- 40 m/min/10-30m/min | 12- 40 m/min/10- 30m/min |
| Mana i kau ʻia | 16kw, ʻEkolu-Pālua ʻEhā Uea,380V /50Hz | 16kw, ʻEkolu ʻEhā ʻEhā Uea,380V/50Hz |
| Pumi Hana Pneumatic | 0.7Mpa | 0.7Mpa |
| Hana kiʻekiʻe 900~960mm | 900~960mm | 900~960mm |
| Nui Nui | 7000x5000x2300mm | 7000x3300x2300mm |
| Kaumaha | 5000 kg | 5000 kg |
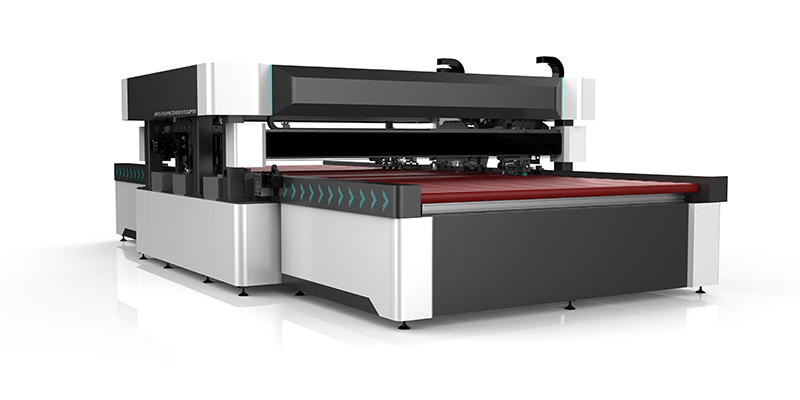
Hoʻohana ka mīkini holoʻokoʻa i ka puʻupuʻu poʻo ʻehā-wili ʻekolu, a lawe i ʻekolu hoʻoili mana kūʻokoʻa no ke komo ʻana i ka ʻāpana, ka ʻāpana edging a me ka ʻāpana puka, no laila ʻoi aku ka maikaʻi.
Hoʻohana ʻia ka ʻōnaehana hoʻoemi ʻaoʻao e pale pono i nā ʻōpala a me ka indentation o ka Low-e Glass.
Hiki ke hoʻokō maikaʻi ʻia ka hana ʻana o nā kihi āpau a me Bottom Edge Grinding i ka manawa like, loaʻa iā mākou ka Low-E Edge Deletion ma ke ʻano he koho.
Me ka lolouila hoʻokele ʻenehana, ʻoi aku ka nui o ka hoʻonui ʻana o ka lako polokalamu a maʻalahi ke launa pū me nā mea hana ʻē aʻe a me ERP.
Hoʻohana ʻia ʻo Servo Motion Control System, kūpono a pololei.Hoʻopili ʻia ka lōʻihi, ka laulā a me ka mānoanoa o ke aniani, a ua hoʻohālikelike ʻia nā ʻāpana hana me ka ʻole o ka hana lima.
● Pūnaehana hoʻomalu Xinjie XLH-24A16L mea hoʻokele hoʻokele ʻO ka ʻōnaehana hoʻokele ʻenehana ʻoihana e pili ana i ka PC ʻoihana a me ka EtherCAT bus kamaʻilio kākoʻo IEC61131-3 papahana papahana maʻamau.Loaʻa iā ia ka polokalamu maʻalahi, ka pilina aloha a maʻalahi i nā mea hoʻohana e hoʻokō i ke kūkulu lua.
● Ma muli o ka Industrial Ethernet bus communication mode, hiki iā ia ke hoʻohana piha i ka hana kamaʻilio pūnaewele e hoʻomaʻamaʻa i ka kaʻana like ʻana i nā kumuwaiwai a me ka hana hui multirobot, ka mahele o ka hana a me ka hui pū ʻana, a hiki ke hoʻomaopopo maʻalahi i ke kamaʻilio mamao a me ke ao pūnaewele a me nā MEs, me ka ʻole o ka hoʻohui ʻana i nā kamepiula i ka wā. hoʻopili me ka ERP mea hoʻohana hope.
● Holo ka ʻōnaehana ma ka paepae Win7.He 100M/S ka nui o ke kaʻa kaʻa kaʻa kaʻa kaʻa Ether CAT, ʻo 500us ka manawa, ʻo 1 ms ka polokalamu scanning, ua hui pū ʻia ka wikiwiki a me ka pololei. hoʻohana ʻia ka waihona no ka hoʻopaʻa ʻana i ka ʻikepili, a ʻo ka mana paʻi he ʻike kūpono.
● Servo hoʻohana Xinjie momoku kaʻa kaʻa waiwai loa o 17 bit kiʻekiʻe precision Tagawa encoder, hana mai Iapana Yaskawa ohana pinepine mīkini hoʻololi hoʻohana kiʻekiʻe kumu kūʻai hana Xinjie momoku ahi, keia hoʻonohonoho o ka nenoaiu hiki maximize e hālāwai me ka mea kūʻai mai ka pilikino pono koho 'ē aʻe high- hope lama, hiki ke e pani ʻia me ka hoʻololi ʻole ʻana i ka polokalamu ʻōnaehana, hoʻohālikelike kiʻekiʻe.